Receiver Tab
A receiver is a device that (as its name suggests) receives data from a transmitter, usually your radio controller. The receiver tab is used to configure the FC such that it can read the receiver data. The receiver tab is divided into two sections: the receiver output preview and the receiver configuration.
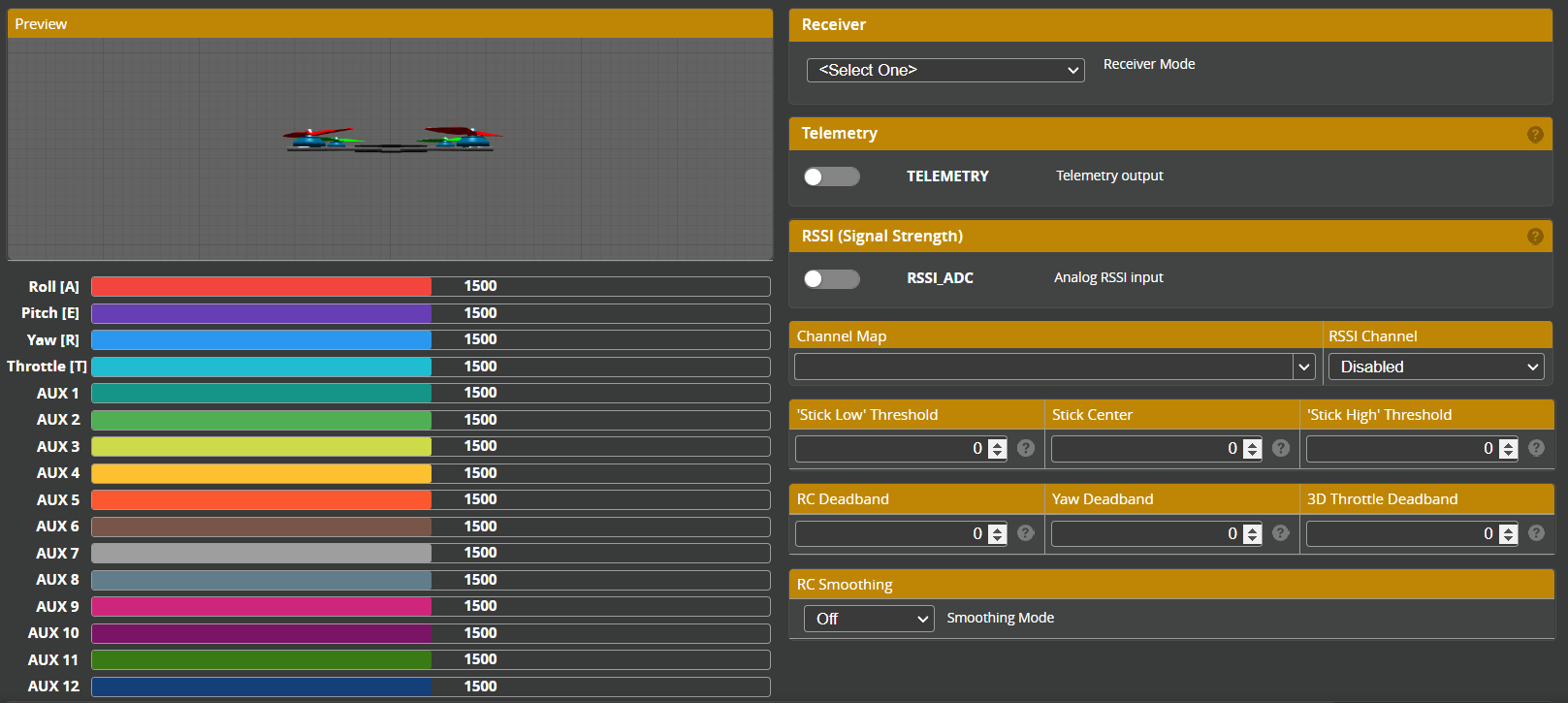
Output Preview
The receiver output preview shows the current state of the receiver channels, both in channel value and graph forms, and how those affect the drone movement.
Receiver Configuration
Used to configure all of the settings that are specific to your receiver
Receiver
Select the communication protocol used by your receiver. The options are:
- PPM/CPPM - Legacy protocol, unlikely to be used in modern setups
- Serial-based - Most modern receivers communicate over serial, using different protocols like CRSF or SBUS
- PWM - Legacy protocol, unlikely to be used in modern setups
- MSP - An advanced option, using the MSP protocol to communicate with the receiver
- SPI - Used for most integrated receivers, like ExpressLRS on tinywhoop AIO boards
Selecting the incorrect protocol will lead to no signal being detected, or the signal being interpreted incorrectly. You have to pick the correct one for your receiver
Telemetry
Toggle the telemetry output on or off. Also required for VTX control from ELRS receivers
RSSI
Mostly a legacy option, used to configure a separate analogue 0-3.3V RSSI input. Most modern receivers communicate RSSI (along with other telemetry data) over the same serial connection as the control data.
Do not enable this option with a modern receiver
Channel Map
Different receivers output the four main control channels:
- Aileron - Roll (left/right)
- Elevator - Pitch (forward/backward)
- Throttle - Throttle (up/down)
- Rudder - Yaw (left/right)
If your radio input does not match up to what you see in the preview, you need to change the channel map. There are also preset options for some of the more common systems:
- FrSky/Futaba/Hitec - FrSky, Futaba, and Hitec receivers output the channels in the same order as the Betaflight default (AETR1234)
- Spektrum/Graupned/JR - Spektrum receivers output the channels in a different order than the Betaflight default (TAER1234)
RSSI Channel
Some older receivers only had RSSI output on a single channel. If you have an older receiver, you can set which channel is used to read the RSSI value. This is usually AUX 4 or 12. Leave this setting disabled if you have a modern receiver such one using the CRSF or GHST protocols
One use case for this setting on modern equipment is to view LQ on DJI FPV goggles, which do not include a native LQ
field. In this case you can set this channel to the channel used for LQ - AUX11 on ELRS. A better solution is to
enable the osd_craftname_msgs CLI option or install WTFOS on your DJI FPV system for a full customisable OSD
"Stick" Settings
Minimum/Center/Maximum values for the four main control channels. These are used to set the range of the stick values, usually for safety and calibration purposes
Deadband Settings
Deadband is the range of stick movement that is ignored. Some radios/receivers may have a small amount of jitter, and this setting can be used to ignore that. You also have options to set it specifically for Yaw and 3d mode throttle
RC Smoothing
Toggle the RC smoothing filter on or off