Betaflight Connector Standard
Version Change Register
| Version # | Revision Date | Changes, Reasons, and Notes |
|---|---|---|
| Draft 0.1 | 27 April 2023 | Initial Draft Format |
| Draft 0.2 | 08 May 2023 | Added Logo and pinout correction |
| Draft 0.3 | 16 June 2024 | Adjustment to GPS to 4 pin, moved to RX and renamed, and adding SWD |
| Version 1.0 | 14 April 2025 | Formalize standard |
| Version 1.1 | 24 April 2025 | Add option for 10P ESC socket |
| Version 1.2 | 08 May 2025 | Add reference schematic + board renders |
| Version 1.3 | 16 December 2025 | Add reference schematic + board renders for 4-pin and 3-pin camera connectors |
Introduction
Drone usage has grown rapidly in recent years, along with a thriving community and a wide variety of drone types now available on the market. Many manufacturers produce drones and components, but the lack of standardization has led to compatibility issues between parts.
This fragmentation has made it challenging for users to build and maintain multi-rotor drones. As the industry continues to expand, the need for standardized components has become increasingly clear.
To address this, we have established a standard for drone connectors designed to ensure compatibility across components from different manufacturers. This standard will reduce confusion, streamline the building and maintenance process, and contribute to a more efficient and cost-effective drone industry.
Connector Standards
Availability
Any harness should be widely available and easy to obtain. The harness should be available from multiple sources and should be easy to obtain from any source.
Using yellow connectors is preferred to make it clear the new standard is used. Provide legacy wire harness in addition to the standard for current products.
JST SH Series as Standard for Connectors.
JST-SH is a widely used and reliable connector that has proven to be a robust choice for drone applications. The connector should be the standard for all drone manufacturers, ensuring compatibility between components from different manufacturers.
JST GH Series as Optional Component.
Some manufacturers also use other firmware, such as Ardupilot or Pixhawk, which have their own standard. This connector type is optional for drone manufacturers, allowing them to choose the connector type that best suits their needs as long as they provide a harness for both platforms.
ESC Pin Configuration
We recommend using twisted wires to eliminate any confusion about the mirroring of the connector and to ensure that the same wiring order is used on both sides of the connection.
V+ connection from the ESC to FC will typically carry VBAT voltage direct from the battery connection. The ESC V+ connection is an Input Voltage to the FC whilst RX, GPS and other connectors' V+ pads carry output from the FC's onboard voltage regulators.
In some cases VTX or camera connectors may offer VBAT voltage directly but due to voltage fluctuations induced by the motors the use of VBAT direct to VTXs or cameras is discouraged. To minimise the risk to sensitive VTX hardware it is advisable to provide an additional high voltage regulator for such components. Recommended continuous power draw for this high voltage VTX regulator is ~18W, translating to at least a 9V/2A part, and output voltage should be between 8-12V, preferably 10V.
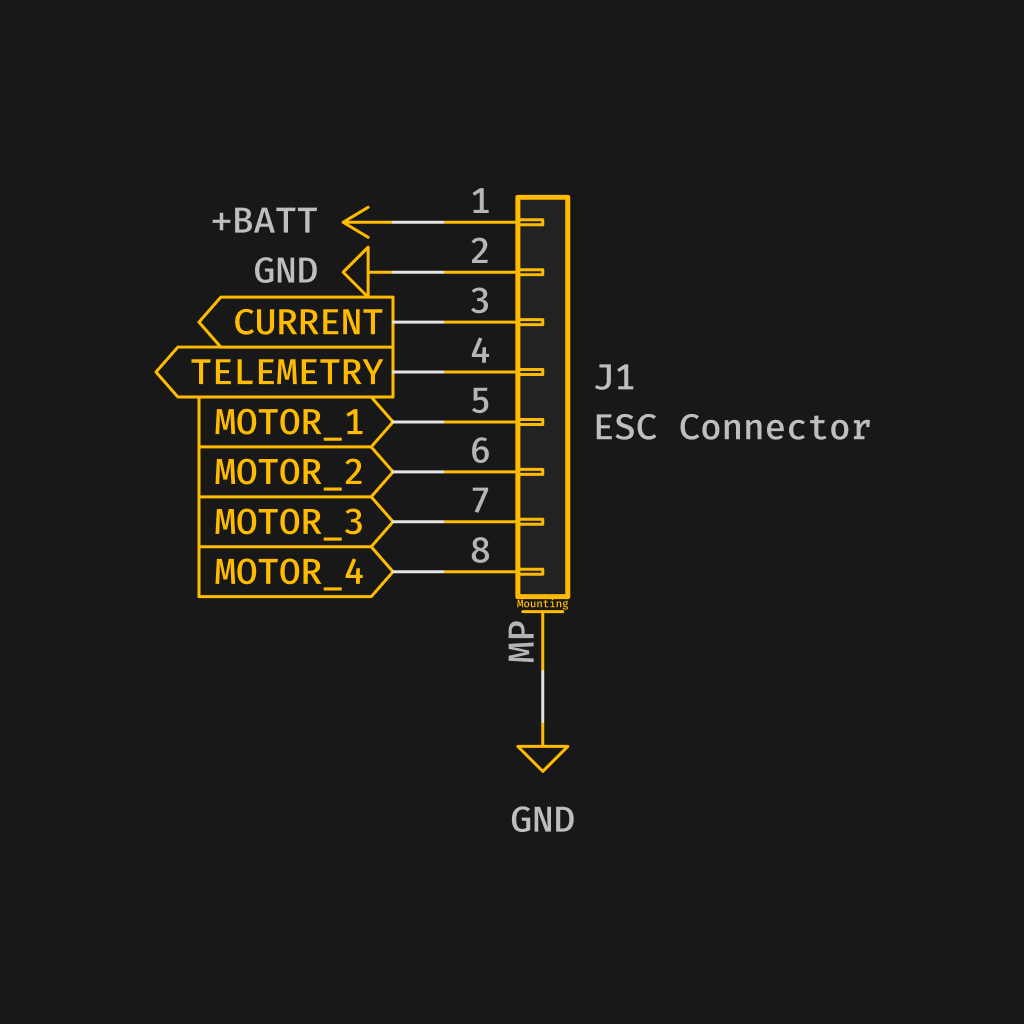
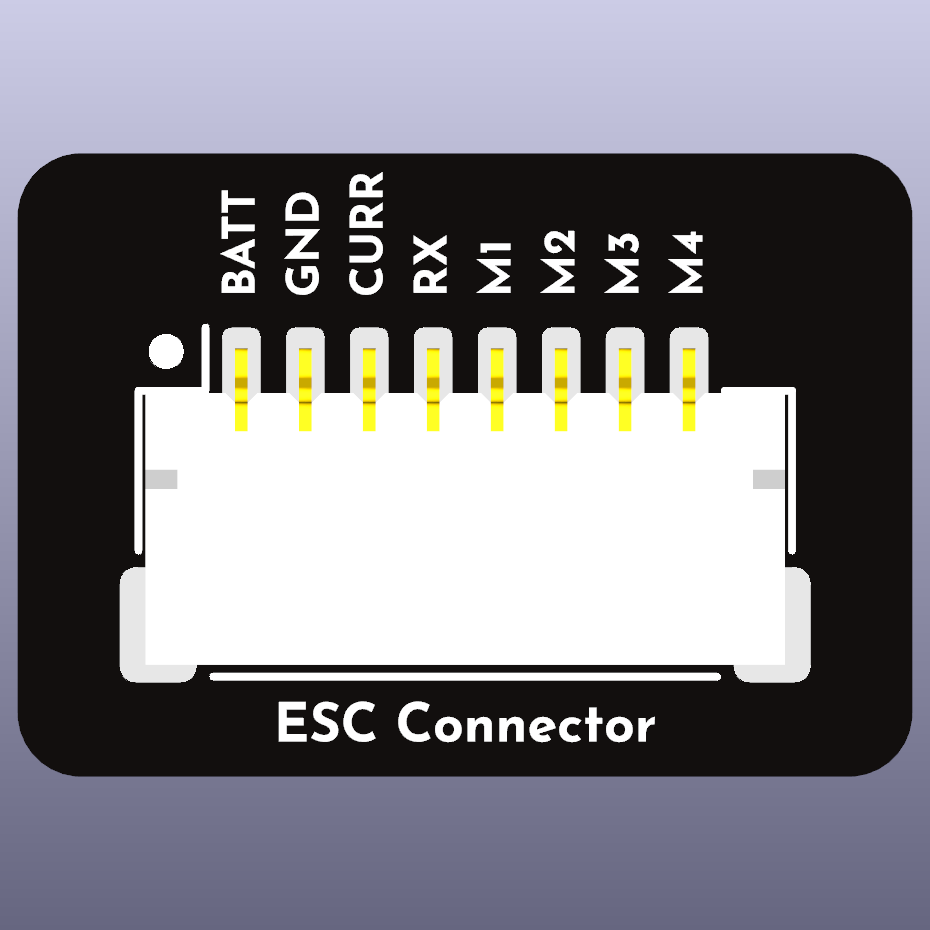
Standard ESC Pin Configuration
The pin configuration for the JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (VBAT) | Power |
| 2 | GND | Ground |
| 3 | Current | Current |
| 4 | Telemetry | Telemetry |
| 5 | Signal 1 | Motor 1 |
| 6 | Signal 2 | Motor 2 |
| 7 | Signal 3 | Motor 3 |
| 8 | Signal 4 | Motor 4 |
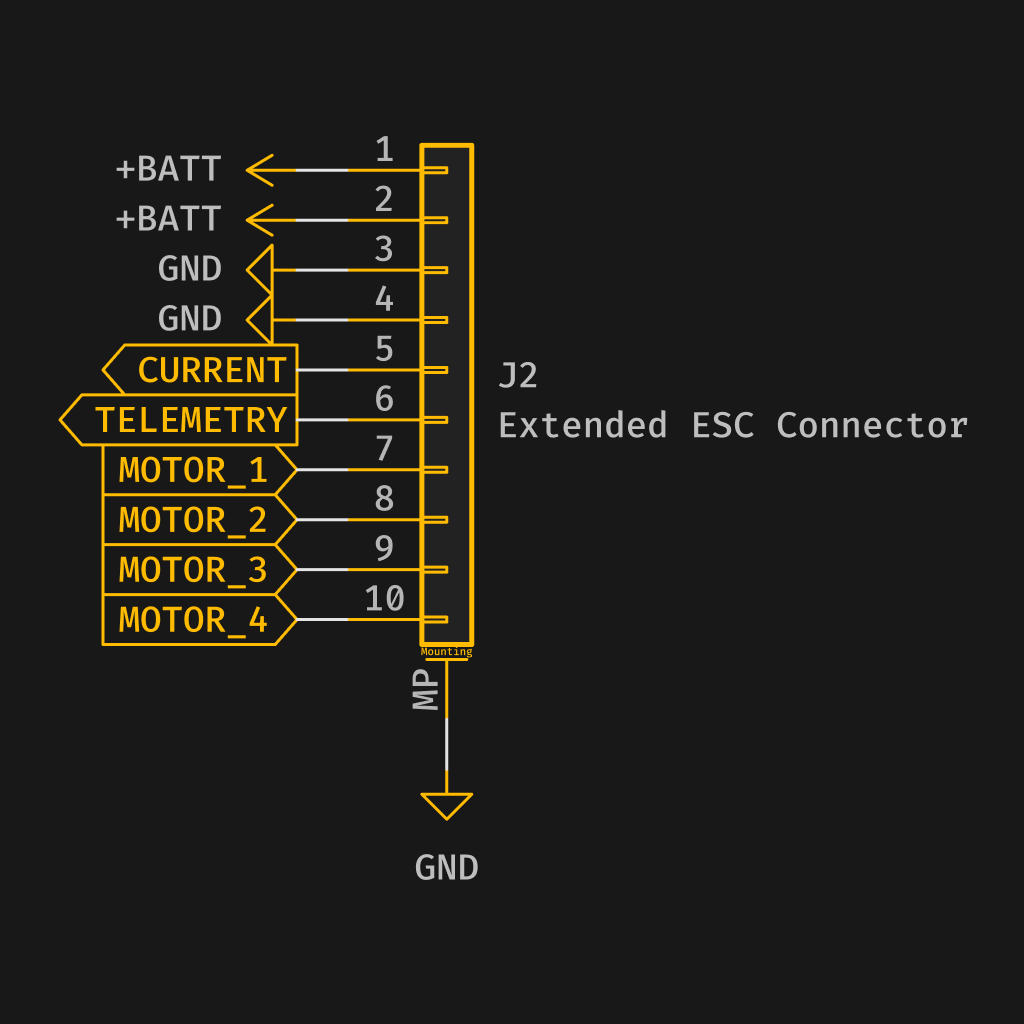
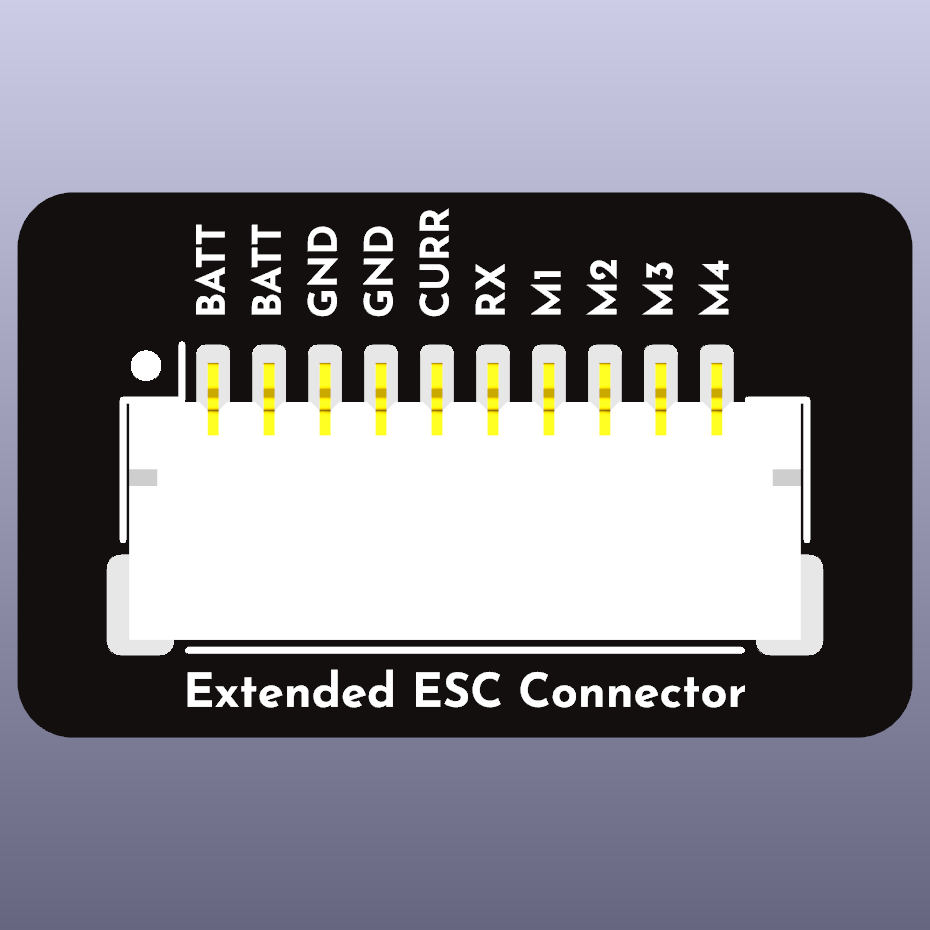
ESC with additional power requirements
An additional 2-pin connector for power (ext. power) can be used for high-powered devices or if the user wants to use an external power source. Alternative a 10-pin connector can be used:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (VBAT) | Power |
| 2 | V+ (VBAT) | Power |
| 3 | GND | Ground |
| 4 | GND | Ground |
| 5 | Current | Current |
| 6 | Telemetry | Telemetry |
| 7 | Signal 1 | Motor 1 |
| 8 | Signal 2 | Motor 2 |
| 9 | Signal 3 | Motor 3 |
| 10 | Signal 4 | Motor 4 |
Serial (UART) Pin Configuration (RX, GPS, and other 5V serial devices)
The pin configuration for the 4 pin JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (5V) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | RX |
| 4 | Signal 2 | TX |
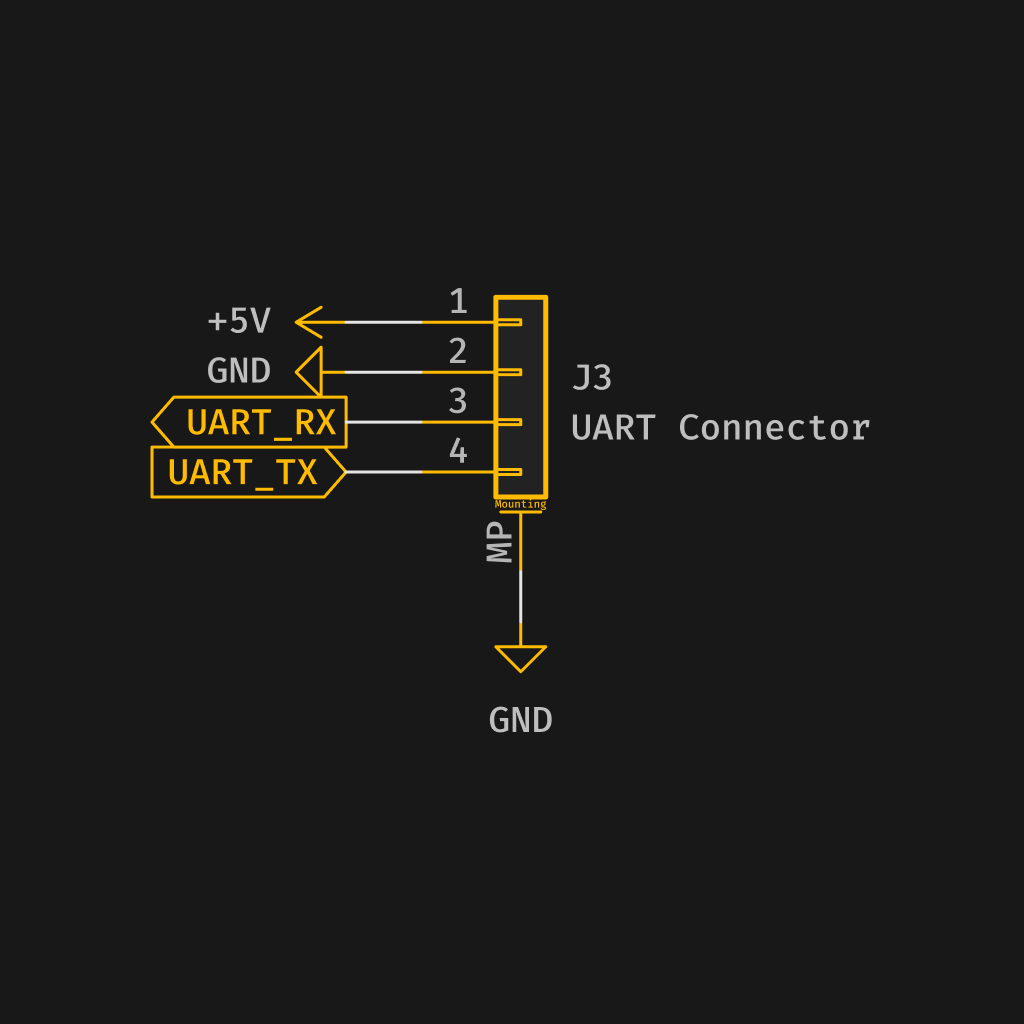
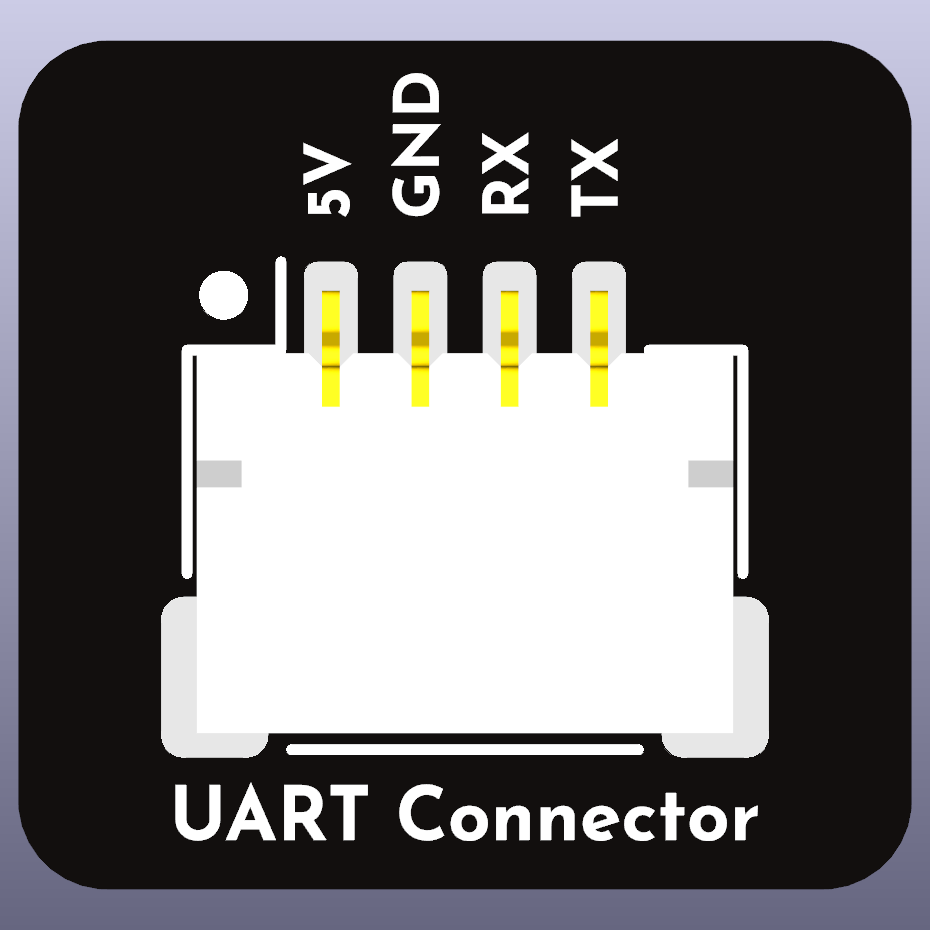
This connector could also be used for any number of serial devices.
Where a GPS module uses a 6 pin cable, e.g. due to a magnetometer and requires I2C, then the requirement will be make use of a Y cable, and consume both a 4 pin serial connector and an I2C connector. Noting that it is not recommended to mount the magnetometer and GPS together.
The pin configuration for the 6 pin JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (5V) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | RX |
| 4 | Signal 2 | TX |
| 5 | Signal 3 | I2C SDA |
| 6 | Signal 4 | I2C SCL |
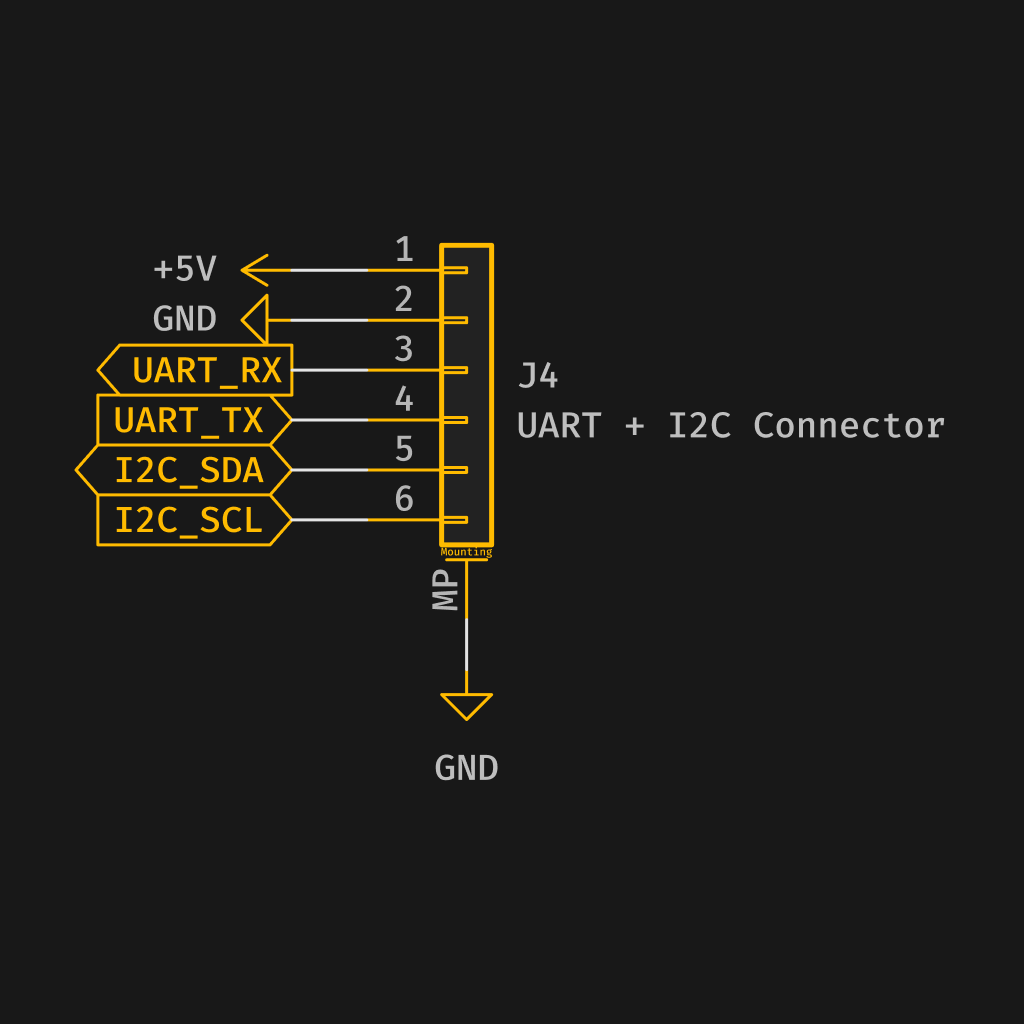
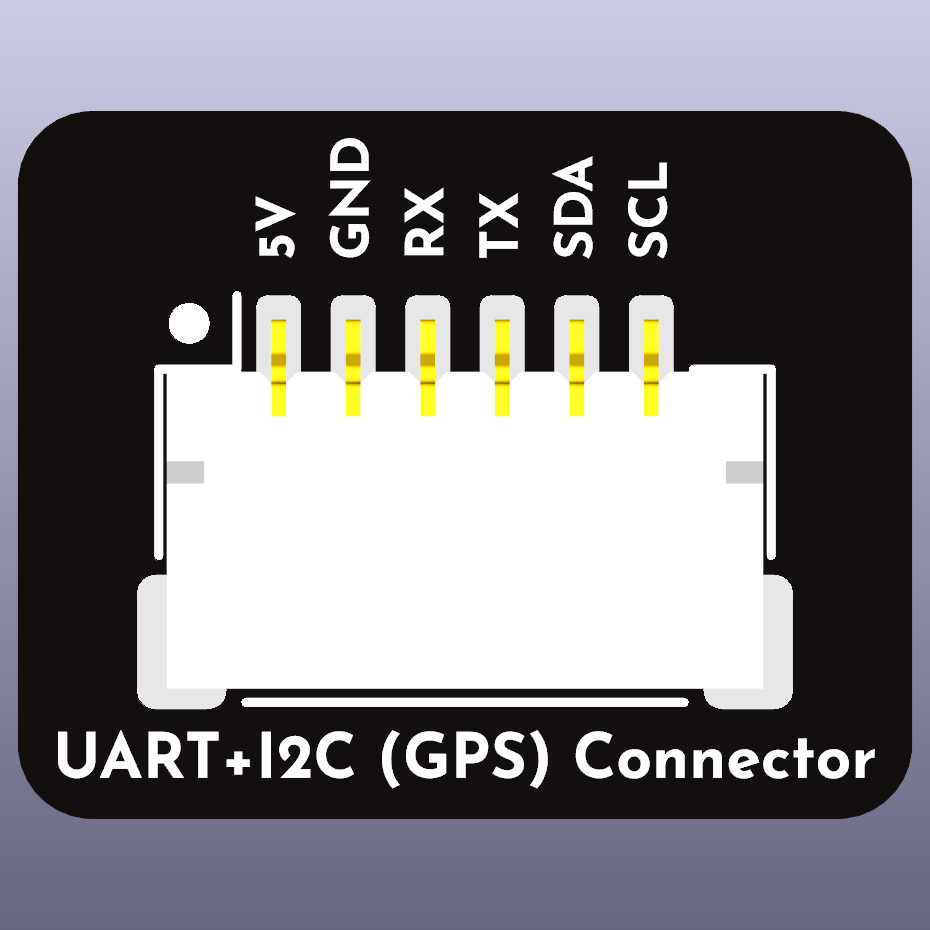
Whilst the 6 pin option is no longer recommended, if it is included in the design then care must be taken to label the connectors clearly so users do attempt to connect 5V equipment to any digital VTX 6 pin if present as the differing power voltages will likely cause damage.
I2C Pin Configuration
The pin configuration for the JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (5V) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | SDA |
| 4 | Signal 2 | SCL |
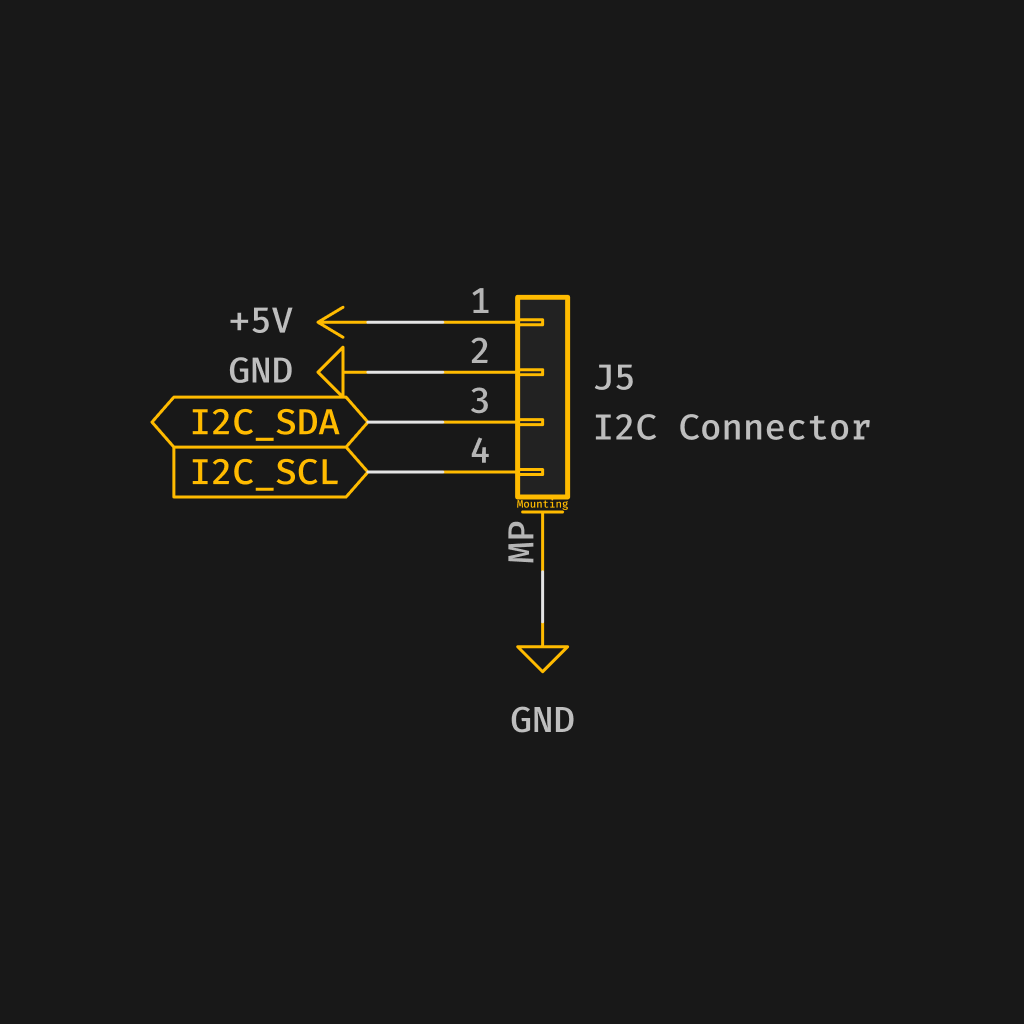
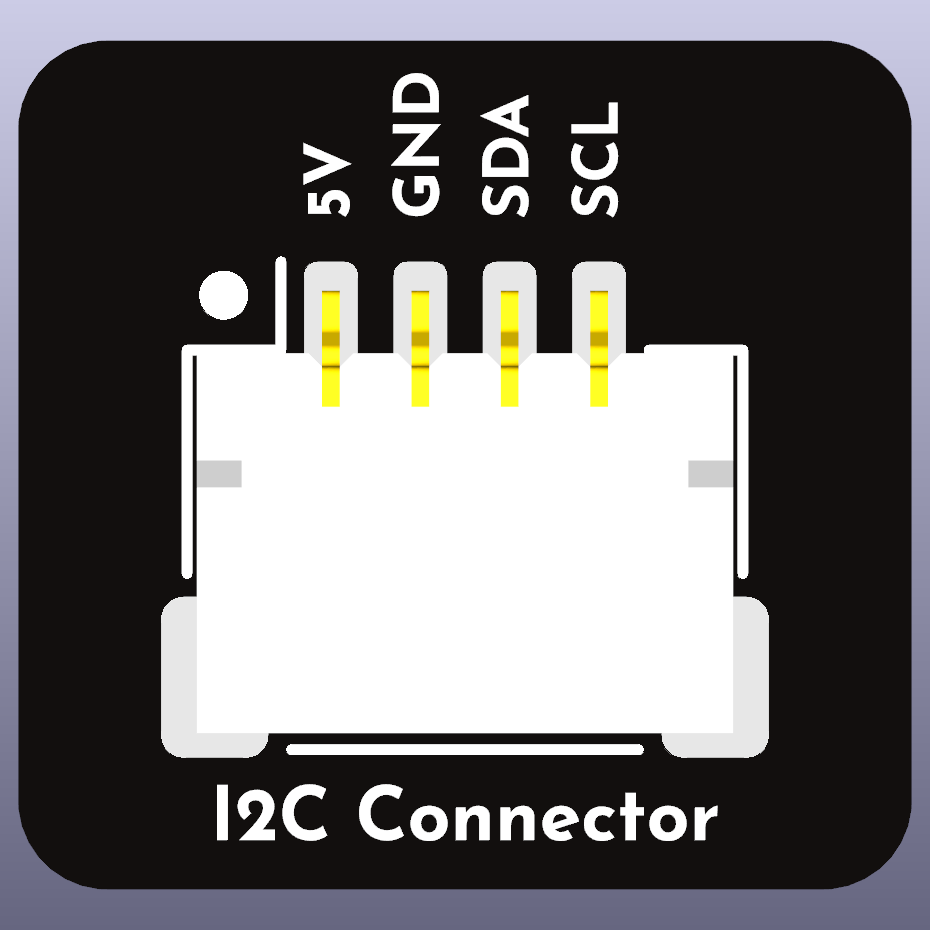
The I2C connector should be used for all I2C devices, including compasses (magnetometers), barometers, and other sensors.
On STM devices pins are shared with PB10 and PB11 for TX3 and RX3 so please keep this in mind when using onboard I2C device such as compasses and barometers.
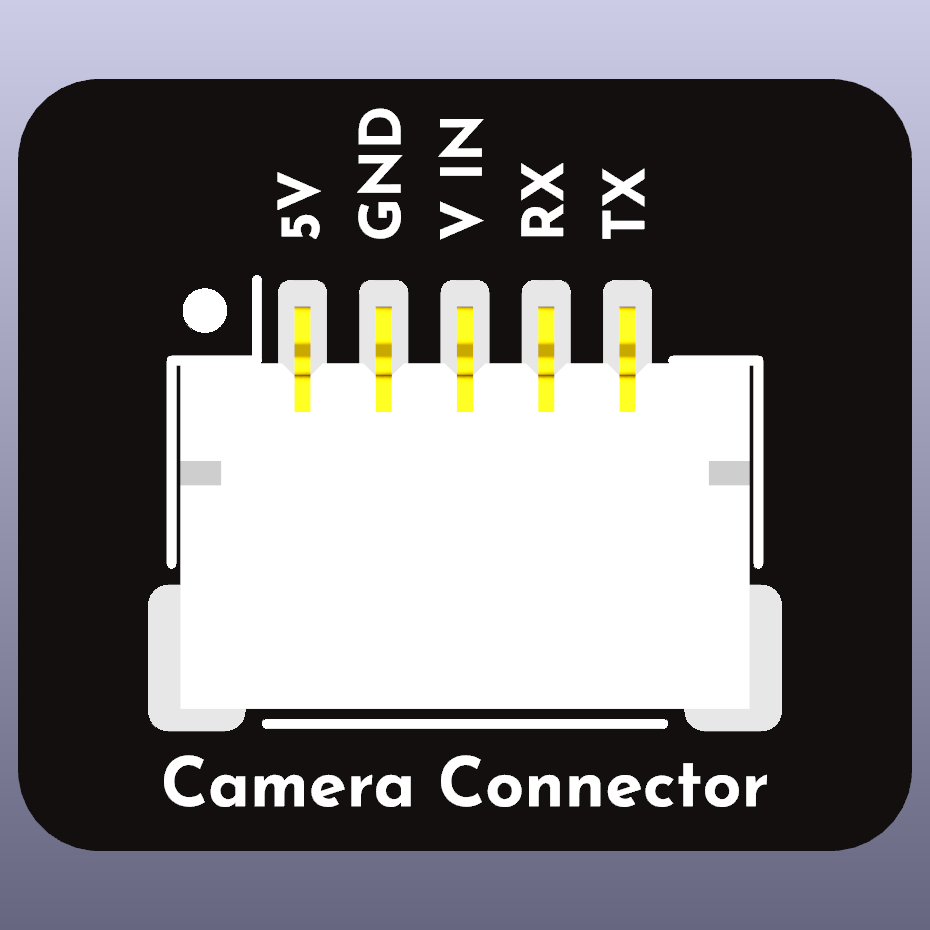
Analog Camera Pin Configuration
It is no longer recommended to have an analogue OSD chip on the FC. The recommendation is to emulate the digital standard, and place the OSD chip on the VTX.
This would render these connectors redundant.
5-pin Connector
The pin configuration for the 5-pin JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (5v) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | Video |
| 4 | Signal 2 | RX |
| 5 | Signal 3 | TX |
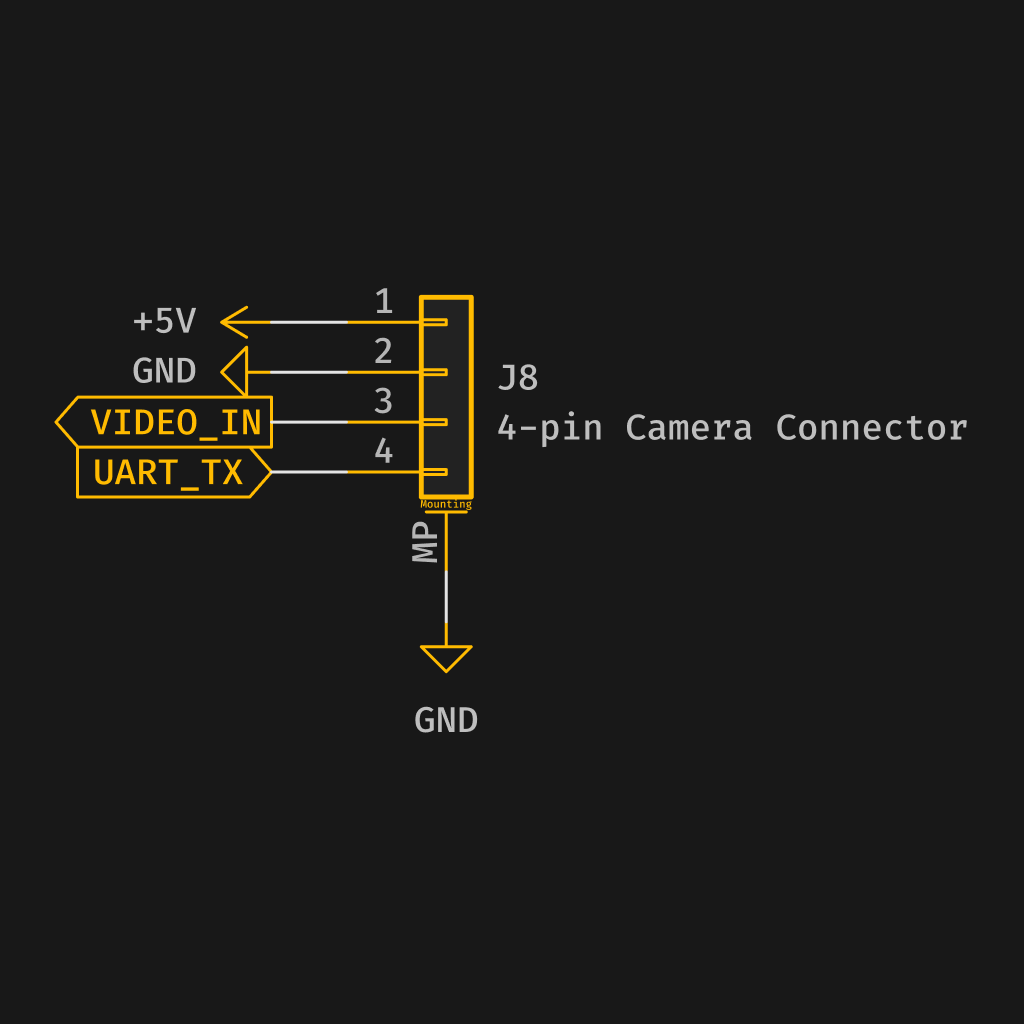
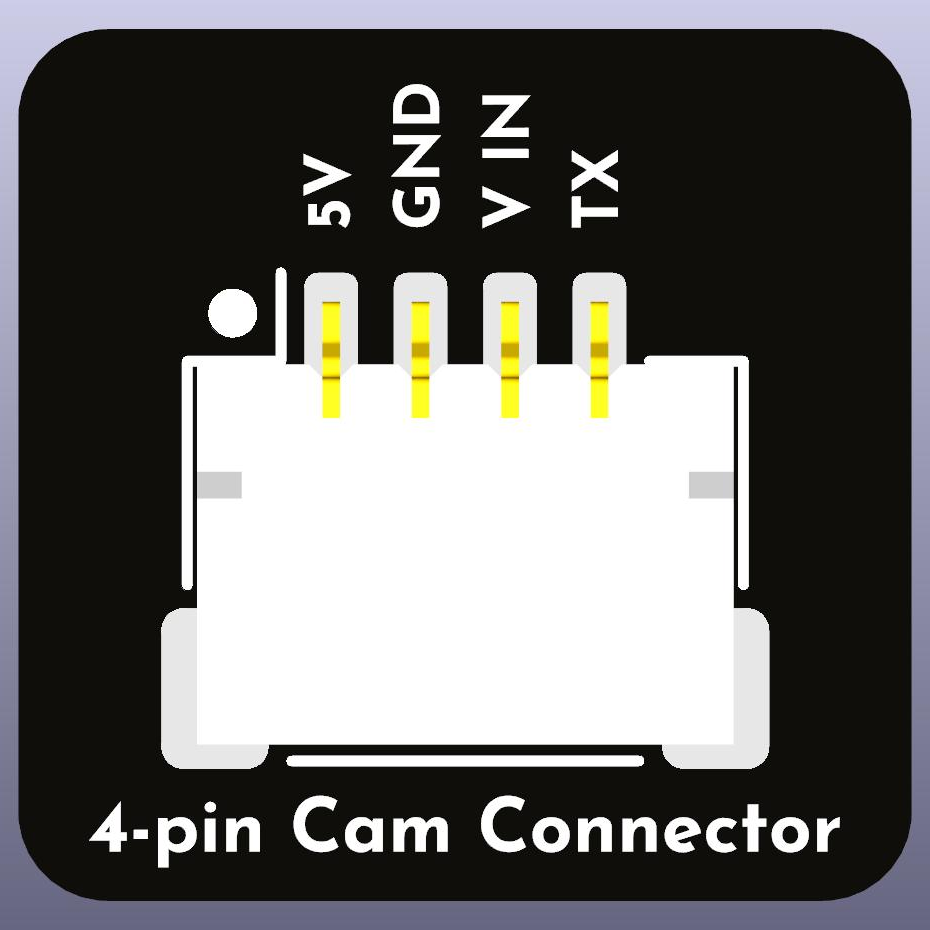
4-pin Connector
The pin configuration for the 4-pin JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (5v) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | Video |
| 4 | Signal 2 | TX |
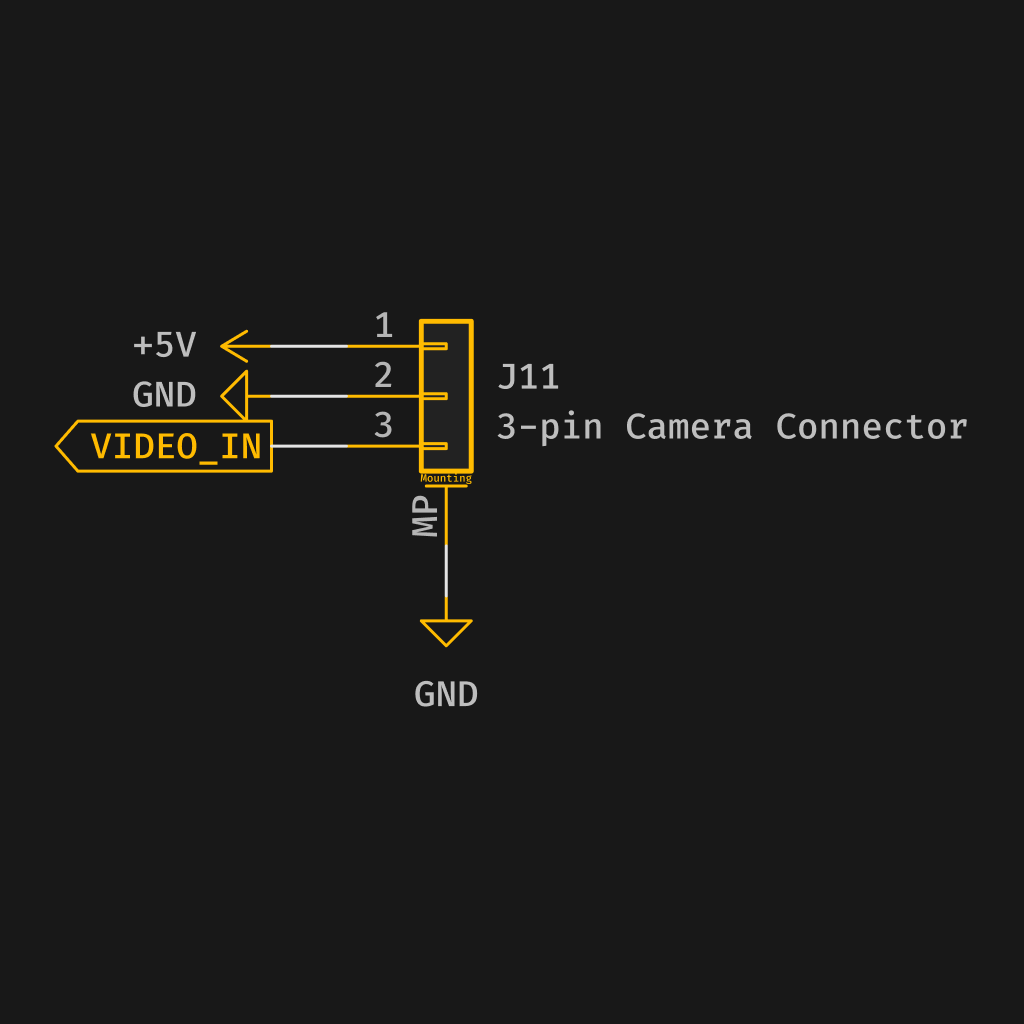
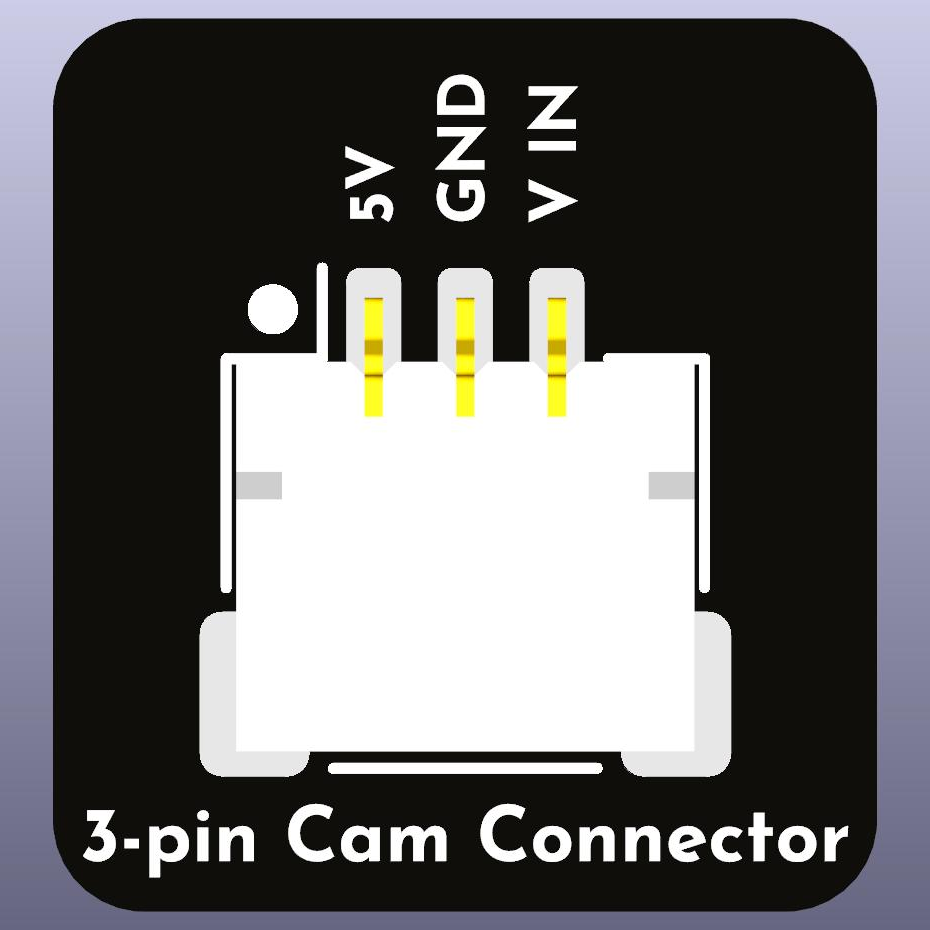
3-pin Connector
The pin configuration for the 3-pin JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (5v) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | Video |
VTX Pin Configuration
The pin configuration for the JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (8-12V) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | Video |
| 4 | Signal 2 | RX |
| 5 | Signal 3 | TX |
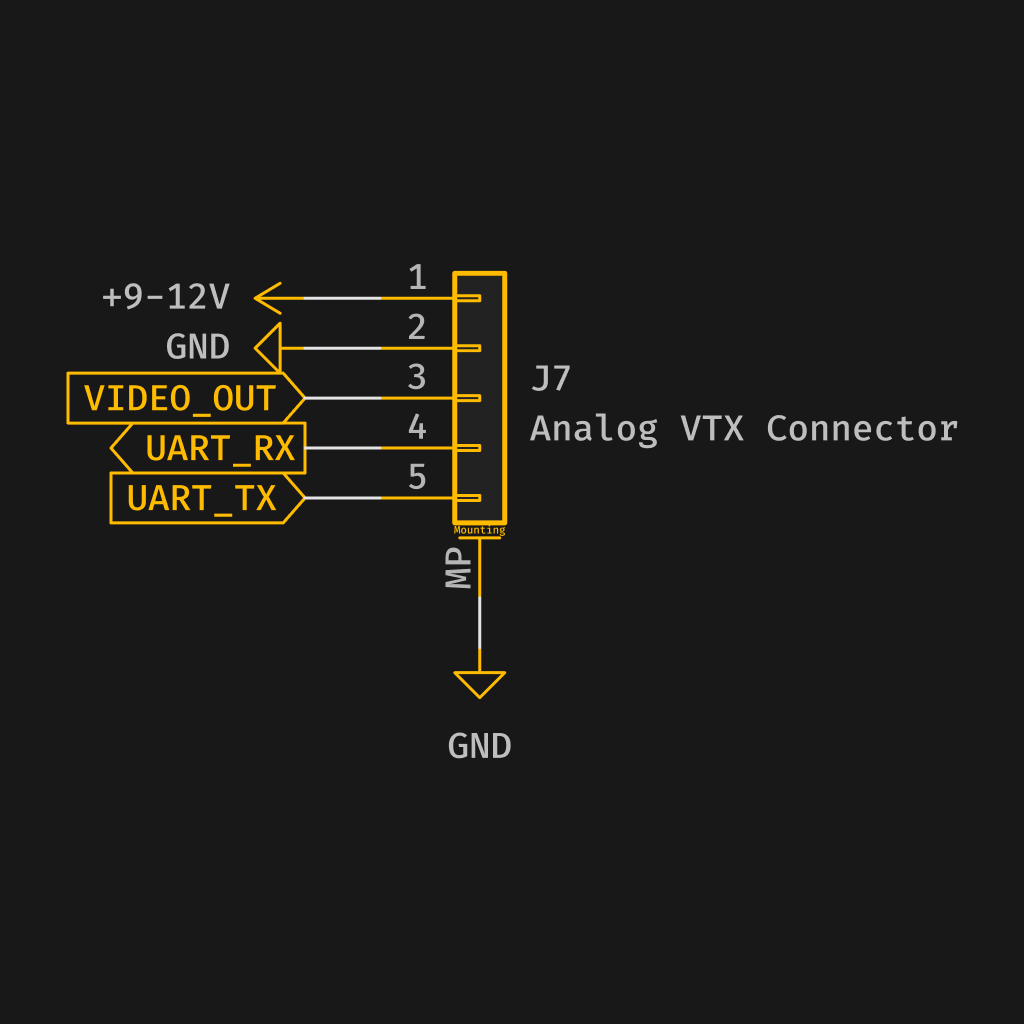
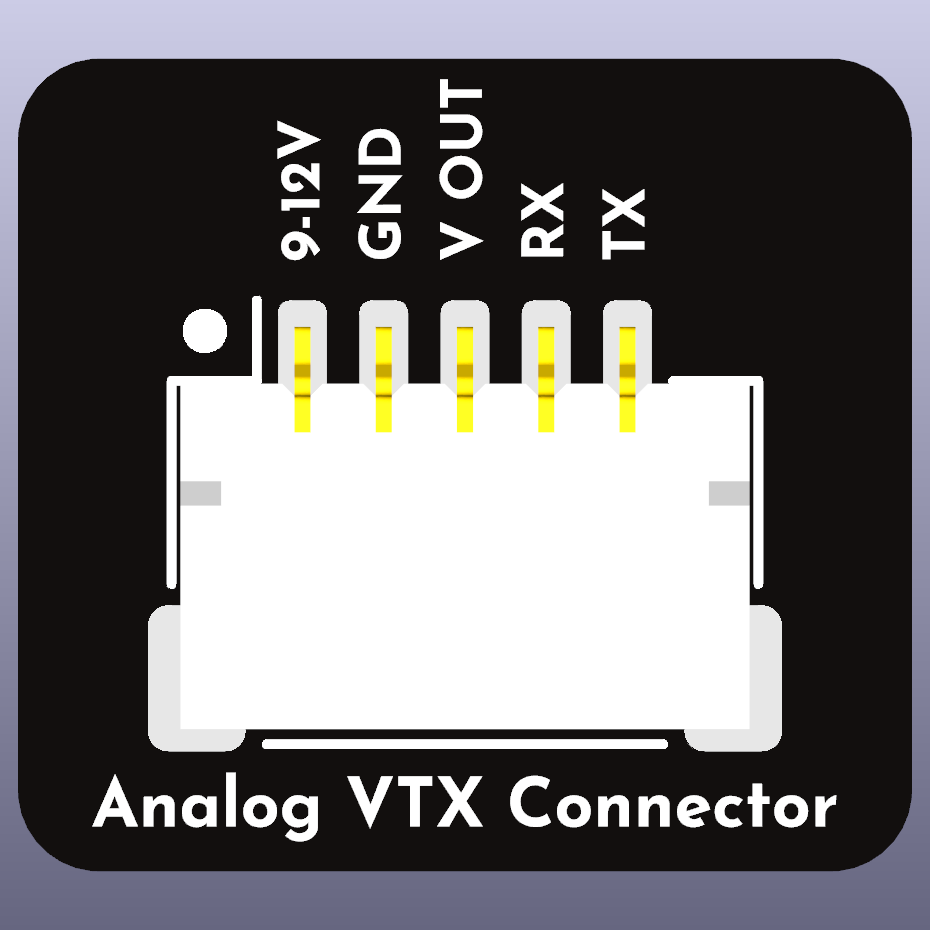
10V regulated for V+ is preferred for providing analogue VTX power.
Digital Video Transmitter Pin Configuration
The current pin configuration for the JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (8-26V) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | TX |
| 4 | Signal 2 | RX |
| 5 | GND | Ground (DJI) |
| 6 | Signal 3 | SBUS (DJI) |
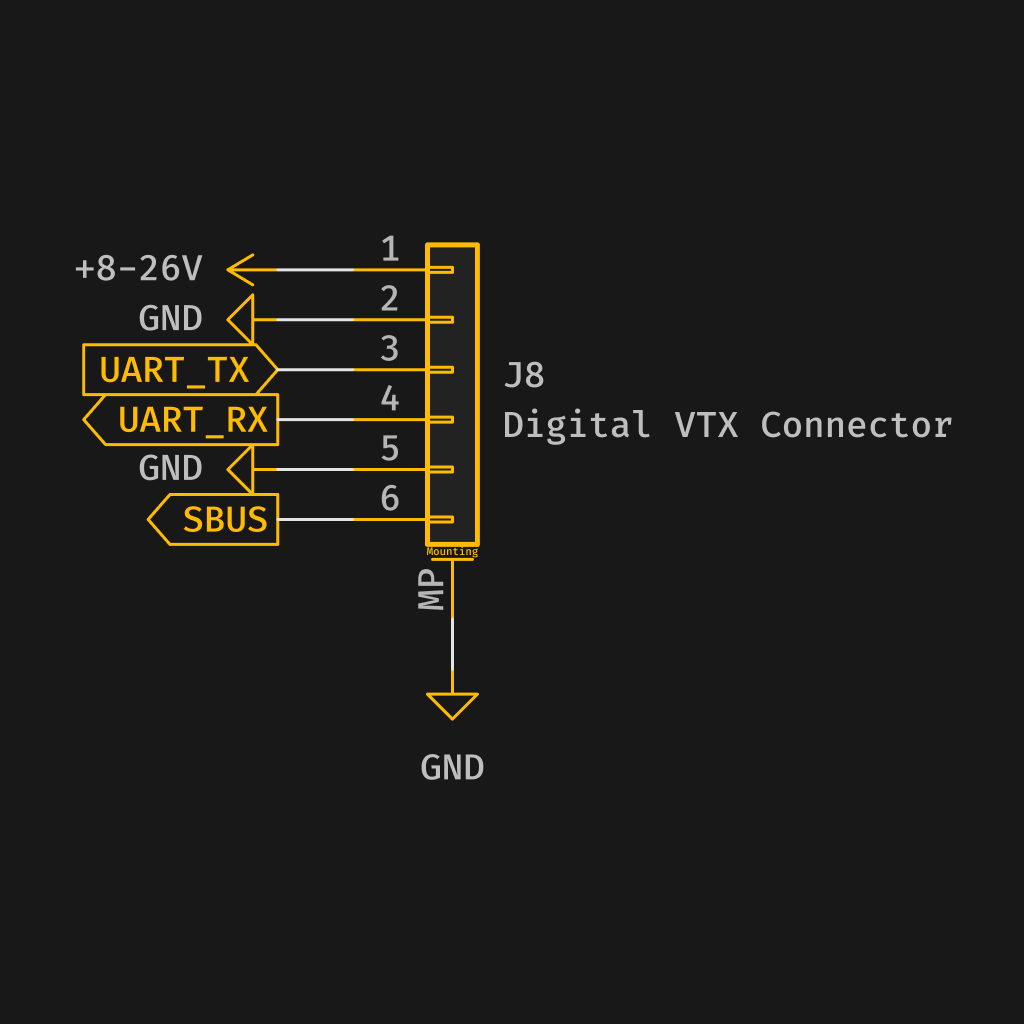
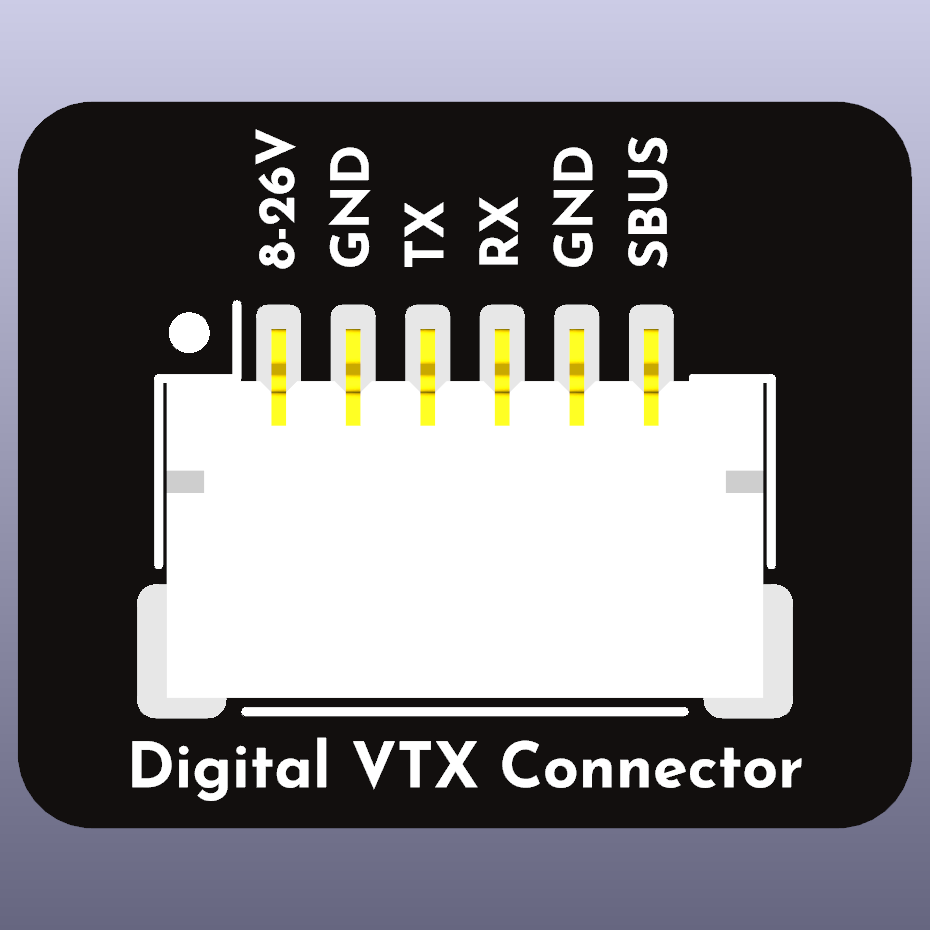
10V for V+ is preferred for digital video transmitter power.
SWD Pin Configuration
The pin configuration for the JST SH connector is as follows:
| Pin # | Signal Name | Description |
|---|---|---|
| 1 | V+ (3V3) | Power |
| 2 | GND | Ground |
| 3 | Signal 1 | SWDIO |
| 4 | Signal 2 | SWCLK |
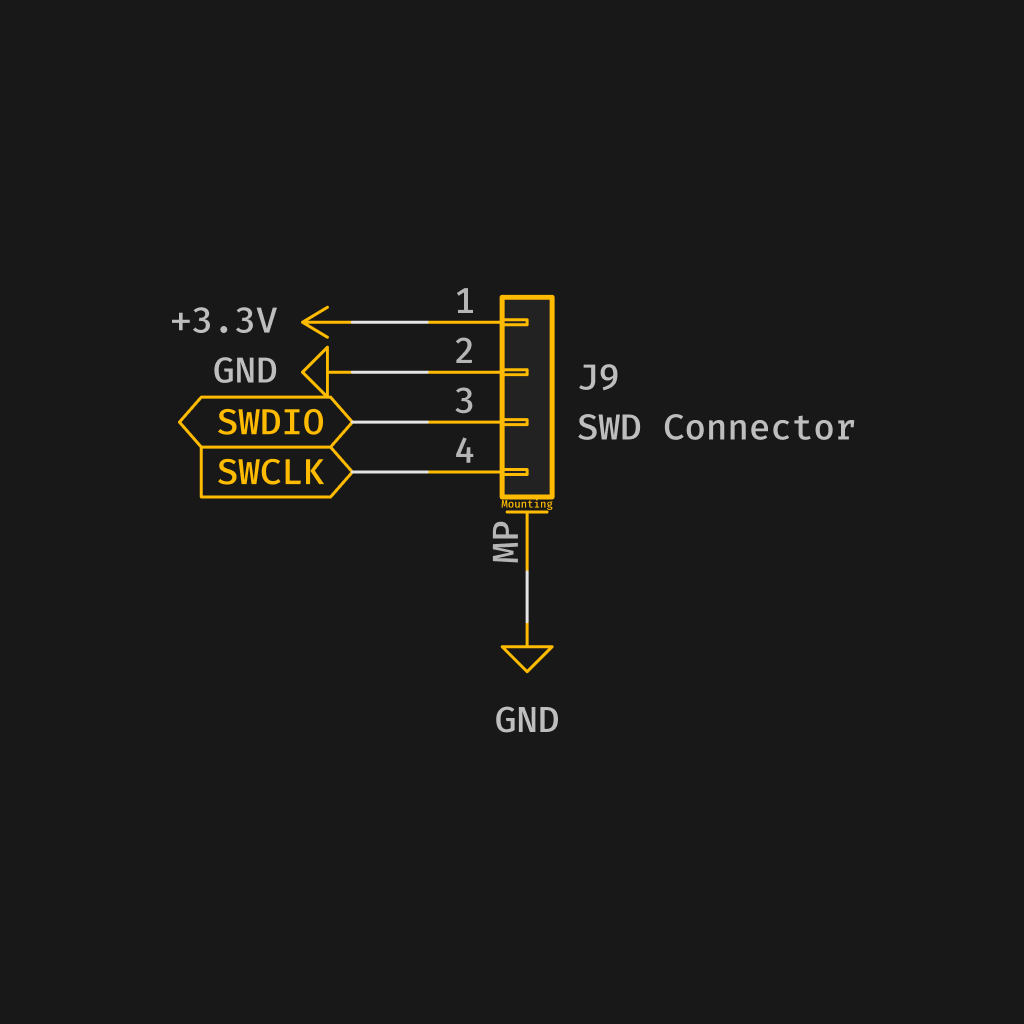
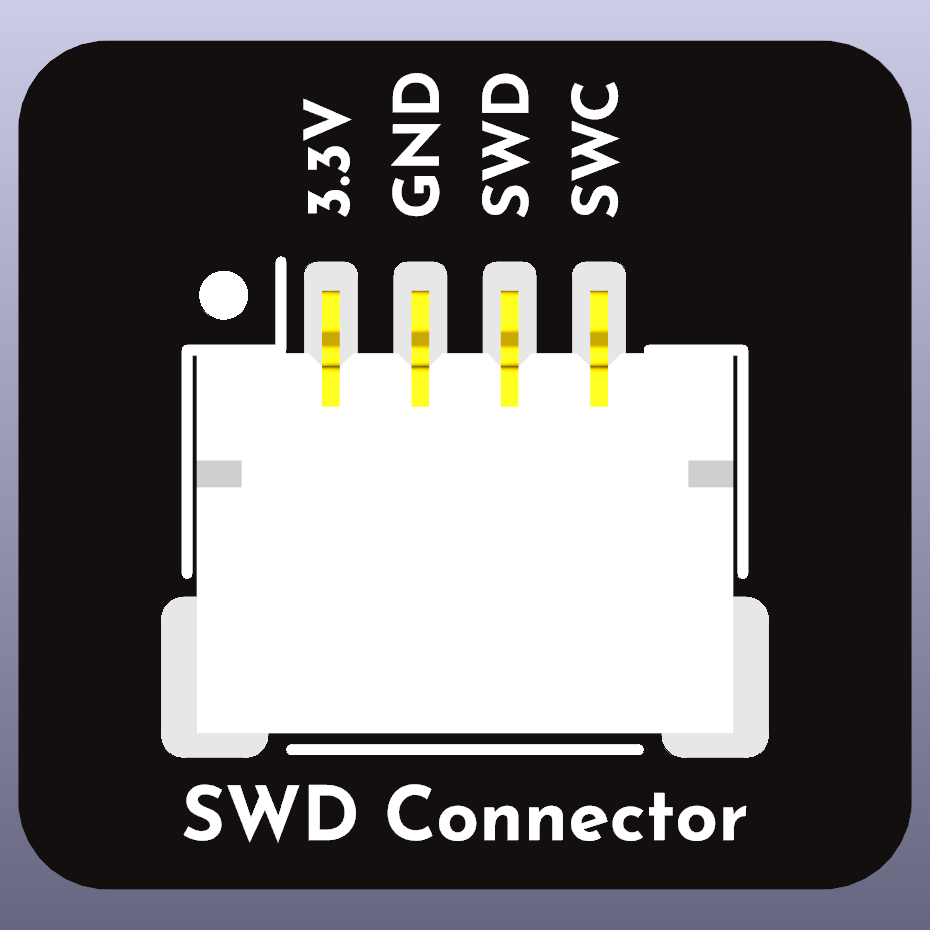
This connector is recommended to be placed for prototyping boards when supplying to the Betaflight team for debugging and testing.
Logo
The provided logo should be used to identify the connector as a Betaflight standardized connector. The logo should be used on all components that use the standardized connector system and can be used on PCBs, packaging, and other marketing materials. This way users know that the component is compatible with other components that use the standardized connector system.
Complete Schematic
SVG

PDF
KiCad Schematic
Betaflight App
The Betaflight App firmware flasher tab provides a link to each board in our documentation. This link will take users to the documentation for the board they have selected.
Each boards documentation section should include a list of components that are compatible with the standardized connector system. Documentation should include schematics, pinouts, and other information that will help users build and maintain their drones.
Conclusion
The standardized connector system described in this document will help reduce confusion and ensure compatibility between components from different manufacturers, making it easier for users to build and maintain multi-rotor drones. We strongly recommend that drone manufacturers and component manufacturers adopt the Betaflight Connector Standard to benefit the entire drone community.